 Drony
Drony  Sensory do dronów
Sensory do dronów  Oprogramowanie
Oprogramowanie  Akcesoria
Akcesoria  Ochrona i bezpieczeństwo
Ochrona i bezpieczeństwo WingtraOne GEN II VTOL
Szwajcarski dron pionowego startu

WingtraOne GEN II VTOL to rewolucyjny dron pionowego startu, który sprawdzi się w najbardziej wymagających misjach. Do wyróżniających go cech należą:
- Możliwość pionowego startu i lądowania z niemal dowolnej powierzchni
- Kompatybilność z dedykowanymi sensorami RGB, multispektralnym i LiDAR
- Odporność na wiatr i warunki atmosferyczne
- Długi czas lotu
- Szwajcarska marka
DJI Agras T30
Dron rolniczy ze zbiornikiem o pojemności 30 L do oprysków z powietrza

DJI Agras T30 to niezwykle wydajny dron rolniczy. Pozwala realizować oprysk roślin na obszarze 16 ha w ciągu godziny.
- Pojemność zbiornika 30L
- Inteligentna bateria – aż do 1000 cykli
- System rozsiewu v3.0
- Lekka, trwała konstrukcja z włókna węglowego
- Kontroler o stabilnym zasięgu do 4 km
- Sferyczny radar – wykrywanie przeszkód we wszystkich kierunkach
DJI Mavic 3 Enterprise z ubezpieczeniem DJI Care
Dron, który wprowadza nowe standardy do fotogrametrii i geodezji

Dron DJI Mavic 3 Enterprise znajdzie zastosowanie m.in. w sektorze publicznym, inżynierii, budownictwie, energetyce, leśnictwie oraz rolnictwie. Dzięki kompatybilności z modułem RTK, sprawdzi się jako dron do geodezji i fotogrametrii.
- Czas lotu 45 min
- Stabilna transmisja danych DJI O3 Enterprise
- Kompaktowy i przenośny
- Kamera o matrycy CMOS 4/3 cala z mechaniczną migawką
- 56-x zoom hybrydowy
- Kompatybilny z modułem RTK
12 641,46 zł
15 549,00 zł
Dodatkowe korzyści
Baza wiedzy GRATIS! Otrzymasz dostęp do autorskich filmów instruktażowych, dzięki którym wykorzystasz 100% potencjału DJI M3E!
Sprawdź szczegóły!DJI Agras T10
Dron dla rolnictwa, umożliwiający oprysk nawet 7 hektarów w godzinę

DJI Agras T10 to dron stworzony z myślą o nowoczesnym rolnictwie. Pozwala realizować oprysk roślin na obszarze 7 ha w ciągu godziny.
- Pojemność zbiornika 8L
- Inteligentna bateria – aż do 1000 cykli
- System rozsiewu v3.0
- Lekka, trwała konstrukcja z włókna węglowego
- Kontroler o stabilnym zasięgu do 5 km
- Sferyczny radar – wykrywanie przeszkód we wszystkich kierunkach
DJI Mavic 3 Thermal z ubezpieczeniem DJI Care
Profesjonalny dron z kamerą termowizyjną

DJI Mavic 3 Thermal wyznacza kolejny poziom wśród małych profesjonalnych dronów z kamerą termowizyjną.
- Czas lotu 45 min
- Stabilna transmisja danych DJI O3 Enterprise
- Kompaktowy i przenośny
- 56-x zoom hybrydowy
- Kamera termalna 640 x 512 MP o częstotliwości odświeżania 30Hz
- Zasięg do 15 km
- Rozdzielczość video 4k (30 klatek)
DJI Mavic 3 Multispectral z ubezpieczeniem DJI Care
Dron, który łączy w sobie kamerę RGB wysokiej rozdzielczości z czterema sensorami

DJI Mavic 3 Multispectral umożliwia użytkownikowi wykonanie lotu nawet do 42 minut w normalnych warunkach atmosferycznych, dzięki czemu już podczas jednej misji możemy uzyskać zdjęcia dla obszaru od 150 nawet do 200 ha w zależności od rozmiaru piksela terenowego.
- Kamerę RGB wysokiej rozdzielczości
- Cztery sensory multispektralne
- Dwie kamery zintegrowane na trzyosiowym mechanicznym systemie stabilizacji
- Tryb rejestracji video
- Wykonywanie misji z prędkością 15 m/s
- Centymetrowe dokładności współrzędnych środków rzutów każdego zdjęcia
16 665,85 zł
20 499,00 zł
DJI Matrice 30 z ubezpieczeniem DJI Care
Dron do akcji poszukiwawczych i ratowniczych

Drony z serii DJI Matrice 30 doskonale sprawdzają się jako narzędzia dla służb bezpieczeństwa sektora publicznego oraz w energetyce, rolnictwie i myślistwie.
- Lata do 41 minut na wysokości do 7 000 m nad poziomem morza
- Lata przy prędkości wiatru do 15 m/s
- Prędkość maksymalna wynosi 23 m/s
- Ochrona IP55
- Gwarantuje bezpieczny lot
- Transmisja danych OcuSync 3 Enterprise
DJI Matrice 30T z ubezpieczeniem DJI Care
Dron z kamerą termowizyjną

Dron DJI Matrice 30T jest zintegrowany z kilkoma sensorami – kamerą szerokokątną, kamerą zmiennoogniskową, dalmierzem laserowym i termowizją.
- Prędkość maksymalna: 83 km/h
- Czas lotu do 41 minut
- Wysokość lotu do 7 000 m nad poziomem morza
- Ochrona IP55
- Możliwość pracy w niekorzystnych i ekstremalnych warunkach
- Podwójne czujniki widzenia i sensory ToF
DJI Matrice 300 RTK z ubezpieczeniem DJI Care
Dron do fotogrametrii, inspekcji i akcji ratowniczych

DJI Matrice 300 RTK sprawdzi się przede wszystkim podczas szczegółowych inspekcji infrastruktury, a także jako wsparcie akcji ratowniczych czy poszukiwawczych.
- System transmisji danych OcuSync Enterprise
- Inteligentna inspekcja
- Live Mission Recording
- Maksymalna prędkość 23m/s
- Możliwość jednoczesnego montaży trzech sensorów
- Możliwość kontroli przez dwóch operatorów
- Wykrywanie przeszkód w 6 kierunkach
37 153,66 zł
45 699,00 zł
To się opłaca!
Kupując DJI Matrice 300 RTK w zestawie z Zenmuse L1, otrzymasz GRATIS odbiornik GNSS Trimble Catalyst oraz specjalistyczne szkolenie LiDAR!
Sprawdź szczegóły!DJI Matrice 350 RTK z ubezpieczeniem DJI Care
Dron, który oferuje system transmisji wideo i sterowania oraz wszechstronne funkcje bezpieczeństwa

DJI Matrice 350 RTK posiada ogromną odporność na warunki atmosferyczne oraz doskonałe wyniki w czasie lotu.
- Wydłużony czas lotu do 55 min
- Odporność na kurz i wodę
- Najnowszy system transmisji danych DJI O3 Enterprise
- Aparatura sterująca DJI RC PLUS
- Ulepszona kamera FPV z trybem nocnym
- Wykrywanie przeszkód w sześciu kierunkach
Tylko w NaviGate
Umów się na prezentację i poznaj pełnię możliwości drona DJI Matrice 350 RTK!
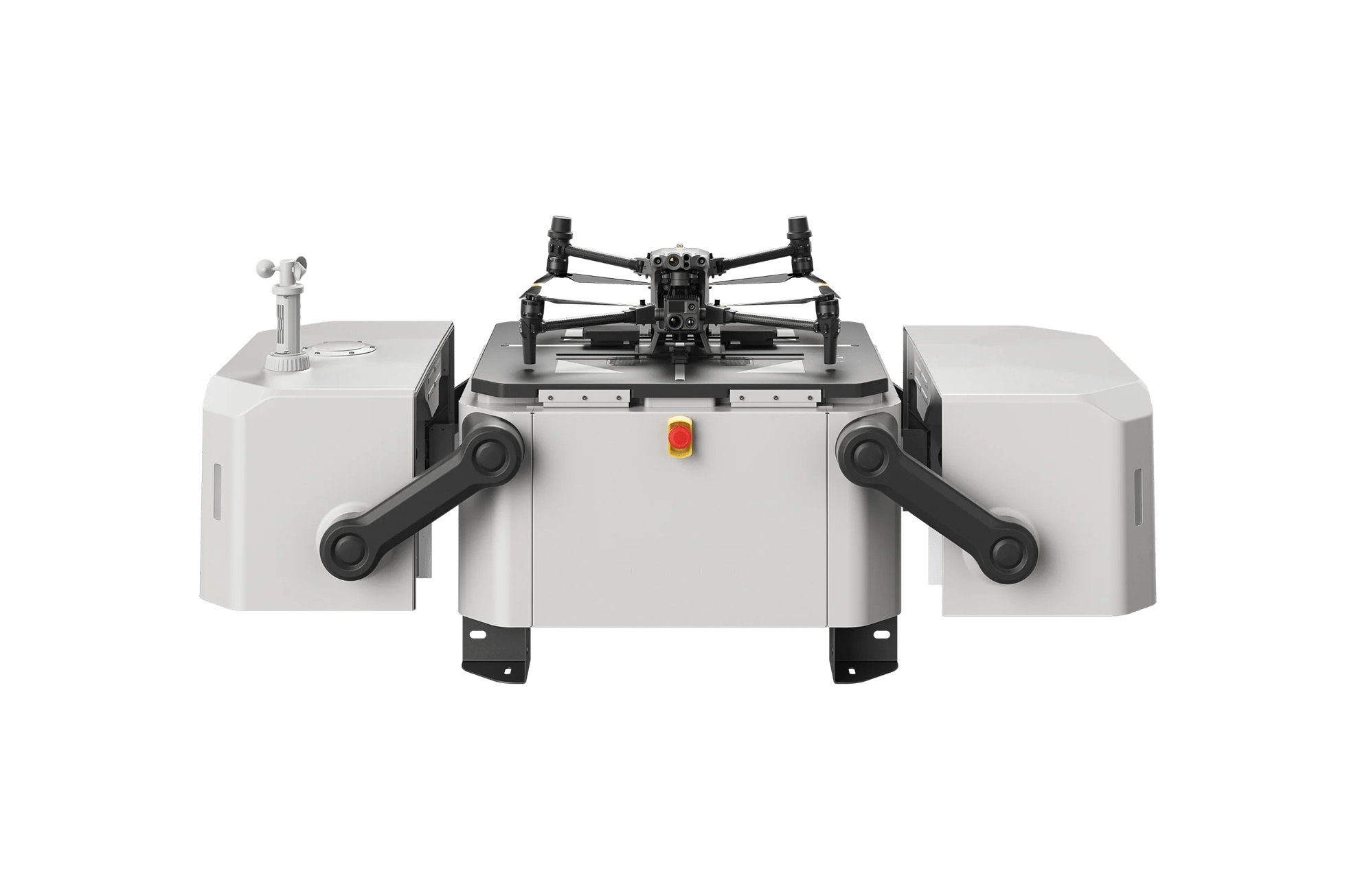
Sprawdź szczegóły!DJI DOCK 2 M3D / M3TD
Nowa wersja stacji dokującej do dronów DJI Matrice 3D / 3TD

Stacja dokująca DJI Dock 2 do dronów Matrice 3D oraz 3TD, będących odpowiednikami M3E i M3T. Zestaw umożliwia programowanie automatycznych misji z użyciem drona. Kluczowe cechy zestawu:
- Wersja z dronem DJI Matrice 3D
- Autonomiczne mapowanie i pomiary
- Wersja z dronem DJI Matrice 3TD
- Kontrola bezpieczeństwa, patrole, inspekcje
- Czas lotu drona: 50 min
- Zasięg operacyjny: 10 km
DJI FlyCart 30
Dron dostawczy o udźwigu 30 kg

DJI FlyCart 30 to dron transportowy, zaprojektowany z myślą o potrzebach m.in. branży ratowniczej, energetycznej, transportu morskiego.
- 30 kg maksymalnego załadunku
- 16 km zasięgu lotu z pełnym załadunkiem
- 20 m/s maksymalnej prędkości
- 6000 m maksymalnej wysokości lotu
- 20 km zasięgu transmisji O3
- Klasa odporności IP55 i odporność na korozję
DJI Matrice 30 + stacja dokująca DJI Dock
Stacja dokująca z dronem DJI Matrice 30
DJI Dock to innowacyjna i jedyna w swoim rodzaju stacja dokująca w zestawie z bezzałogowcem DJI Matrice 30. Umożliwia:
- DJI Matrice 30 w zestawie
- Samodzielny start drona
- Wykonanie automatycznej misji zaprogramowanej w DJI FlightHub 2
- Samodzielne lądowanie po zakończeniu operacji
- Szybkie ładowanie drona
- Wysoka odporność na warunki atmosferyczne
DJI Phantom 4 RTK SE
Dron stosowany w fotogrametrii i geodezji
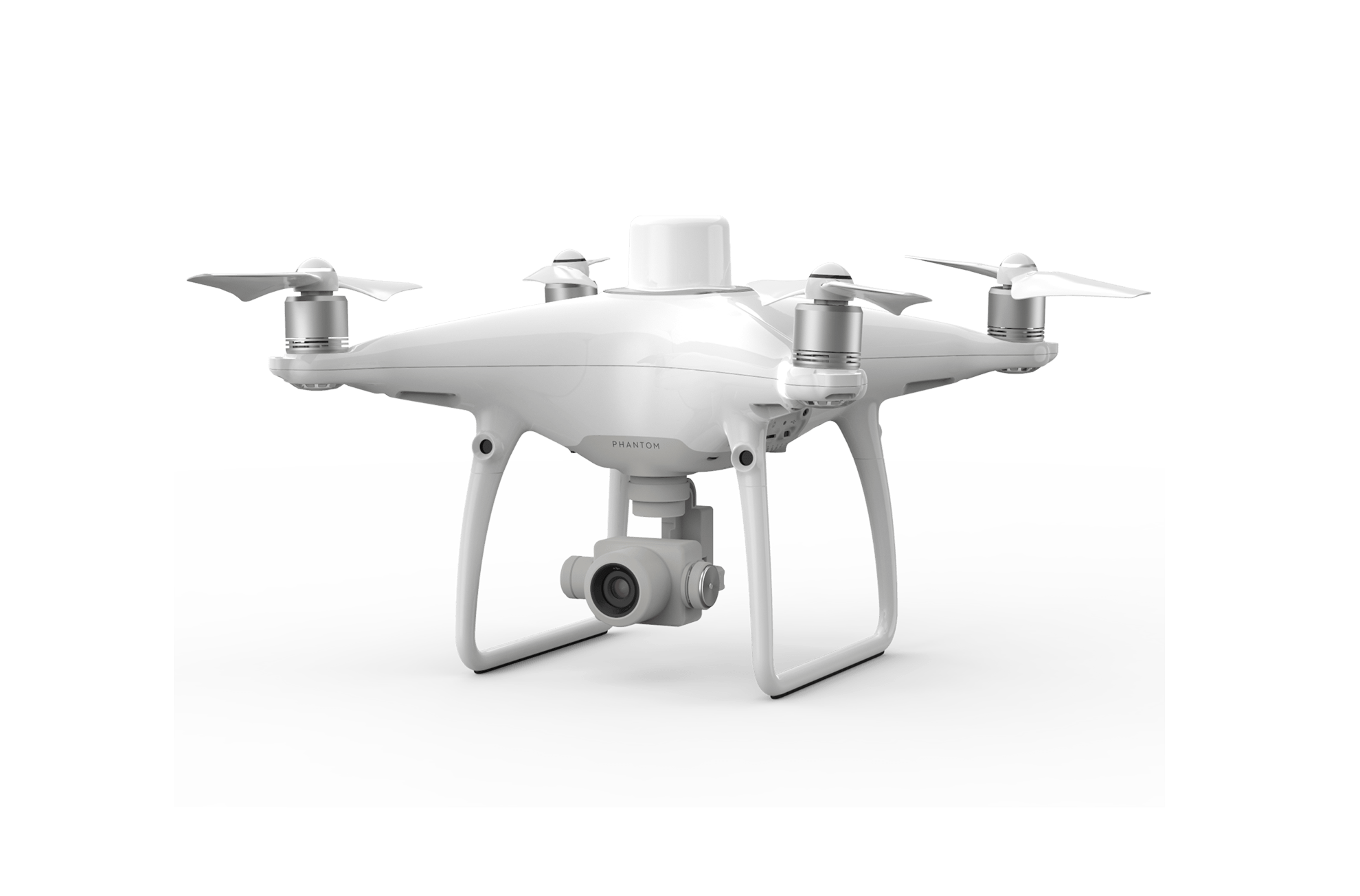
Dron DJI Phantom 4 RTK SE jest stosowany w fotogrametrii i geodezji. Sprawdza się w pozyskiwaniu produktów z wykorzystaniem technologii fotogrametrii z niskiego pułapu.
- Wbudowany moduł GNSS RTK
- Możliwość nalotów 2D i 3D
- Kamera o matrycy 1” CMOS i rozdzielczości 20 megapikseli
- Mechaniczna migawka
- Ekran o przekątnej 5,5” i rozdzielczości 1920 × 1080
- Kompatybilność z ogólnopolską siecią stacji referencyjnych
21 592,68 zł
26 559,00 zł
DJI Phantom 4 Multispectral z ubezpieczeniem DJI Care
Dron dopasowany do potrzeb leśnictwa i rolnictwa

Firma DJI stworzyła zaawansowany zestaw narzędzi złożony z bezzałogowego statku powietrznego, aplikacji do planowania lotu oraz środowiska do analizy danych, wszystko w jednym zestawie.
- Czas lotu do 27 minut
- Zasięg lotu do 5 km
- Płynna transmisja obrazu na żywo
- Pięć kanałów spektralnych (B/G/R/RedEdge/NIR) i osobny sensor RGB
- Stabilizacja kamery na 3-osiowym gimbalu
- Dedykowana aplikacja GS Pro z podglądem indeksu wegetacyjnego NDVI
23 690,24 zł
29 139,00 zł